
Transport de fret par l'industrie privée


Page 1 sur 3
Page 1 sur 3 • 1, 2, 3 


 Transport de fret par l'industrie privée
Transport de fret par l'industrie privée
 Mar 26 Juil 2011 - 20:50
Mar 26 Juil 2011 - 20:50
Un long article de SFN sur la qualification des cargos de deux des sociétés de COTS.
- la Dragon de Space X
- la Cygnus d'Orbital Science
http://spaceflightnow.com/news/n1107/25cotsdemo/index.html
L'article détaille les procédures qui devraient permettre les vols de qualification avec approche de la station et capture.
Le ton général de l'article est qu'il faut accélérer les procédures ... ce qui peut surprendre puisque le dernier vol d'Atlantis était justement fait pour se donner un "peu d'air" en matière d'approvisionnement en fret.
On espère que le souhait d'aller vite .... ne négligera pas de prendre le temps nécessaire et toutes les précautions pour que tout se passe bien :suspect:
- la Dragon de Space X
- la Cygnus d'Orbital Science
http://spaceflightnow.com/news/n1107/25cotsdemo/index.html
L'article détaille les procédures qui devraient permettre les vols de qualification avec approche de la station et capture.
Le ton général de l'article est qu'il faut accélérer les procédures ... ce qui peut surprendre puisque le dernier vol d'Atlantis était justement fait pour se donner un "peu d'air" en matière d'approvisionnement en fret.
"Overall, what we want to do is we want to get to cargo delivery as fast as we can, and if the systems are mature enough and the design is mature enough, combining those two flights is that best way to get cargo to ISS in the fastest manner possible," Gerstenmaier said.
On espère que le souhait d'aller vite .... ne négligera pas de prendre le temps nécessaire et toutes les précautions pour que tout se passe bien :suspect:

montmein69- Donateur

- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise

Re: Transport de fret par l'industrie privée
Mar 26 Juil 2011 - 21:15
montmein69 a écrit:accélérer les procédures ... ce qui peut surprendre puisque le dernier vol d'Atlantis était justement fait pour se donner un "peu d'air" en matière d'approvisionnement en fret.
AMHA, je pense qu’il faut faire légèrement attention au ton employé dans les articles de spaceflightnow…
«Il faut Accélérer les procédures... » certes cela permettra de "prendre un peu d'air", mais les limites sont là..
Ce laps de temps disponible, n'est valable que pour près d'un ans, après ça risque de coincer...(Atlantis n’avait que le raffaello pour transférer près d’un an de fournitures, matériels en tout genres destinés à la station, nourriture, eau etc… la cargaison à été livrée en quantité limité, une quantité paramétrée en fonction de la capacité maximale de décollage de la navette de 135) !
Je pense que pour toute estimation-temps concernant les prochaines livraisons de fret, mieux vaut se référer à quelqu’un directement concerné par la chose…William H. Gerstenmaier.
Au posé des roues d’Atlantis, l’Administrateur associé de la NASA pour les opérations spatiales, a déclaré le que la NASA travaille actuellement avec space X pour tenter d’arriver à combiner le rendez-vous (COTS2) avec une mission d’accostage (COTS3)…il n’a fait que dire aux journalistes (dont certainement ceux de SFN) que la fusion des deux vols COTS étaient en pourparlers.
edit à 00H05 - COTS2/3 officieusement validé pour le 30/11 (selon facebook spaceX et FCS): https://astronautique.actifforum.com/t12104p15-falcon-9-dragon-cots-3-08-10-2011#245067
L’objectif est clair, net et précis et on le savait tous avant le liftoff de STS135, mais aussi après son désamarrage!
La NASA devra inévitablement tenir l'objectif principal qu’elle s’est fixé dans un an maxi! Réaliser une livraison de fret dès que possible après le dernier vol de leur dernière navette. En revanche montmein, effectivement derrière le "dés que possible de Gertsenmaier", se cache le logique « Dans un an maxi », …car je pense qu'ils n'auront pas autres choix, sinon que de ce payer de la place libre dans un véhicule d'une autre agence spatiale (russe?) au cas échéant, ou de proposer à cygnus de bosser pour eux..
Gerstenmaier sur un autre sujet du forum: "Nous ne n’avons pas encore donnés leur approbation formelle», «Nous voulons continuer à passer par une analyse un peu plus poussée. Si leurs systèmes sont arrivés à maturité et que le design est suffisamment mature, la combinaison de ces deux vols ne sera que la meilleure façon d’obtenir une livraison de fret sur l'ISS le plus rapidement possible."
Concernant cygnus…
Les deux sociétés TriDAR et Neptec auraient abouti à un accord commun, visant à utiliser leurs capteurs de haute technologie sur leur vaisseau spatial Cygnus.
Le système de vision (images 3D/vision thermique) de Neptec TriDAR à été dévellopé avec le soutien de la NASA et de l'Agence spatiale canadienne. Tridar à fournit en temps réel des indications visuelles pour la navigation, le rendez-vous et l'amarrage durant la dernière mission d’atlantis. En réalité, ce système a fait ses preuves, non pas sur une seul mission (sts135) mais bien sur trois missions-navette, Discovery STS-128 et STS-131, et Atlantis STS-135.
Grâce aux ultimes tests orbitaux réalisés durant la mission de STS-135, NEPTEC est heureux d'annoncer que son système fera partie intégrante de la flotte des véhicules de ravitaillement de l'ISS. Le vaisseau spatial Cygnus est développé par Orbital et devrait pouvoir effectuer huit missions vers ISS dés 2015 et devrait procéder aussi à l'élimination des déchets de l'ISS. Il sera assemblé sur le lanceur Taurus II , qui partirait vers ISS depuis le site de lancement de Wallops. A noter, que le module pressurisé de fret cygnus est basé sur un MPLM, développé par Thales Alenia Space pour la NASA, ce qui pour le coup faciliterait la fameuse "accélération des procédures"....en croisant les doigts pour que le lanceur lui même et le cygnus puissent êtres opérationnels pour un lancement en 2015! c'est tout de même dans trois ans!
Dernière édition par Sidjay le Mer 27 Juil 2011 - 0:46, édité 6 fois

Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Re: Transport de fret par l'industrie privée
Mar 26 Juil 2011 - 22:41
Question car je n'ai pas bien compris: les cargos COTS s'arrimeront (si oui où) ou seront capturés par le bras robotique et mis en place sur l'ISS?

patchfree- Messages : 6152
Inscrit le : 19/04/2007
Age : 69
Localisation : Poitiers -

Re: Transport de fret par l'industrie privée
Mar 26 Juil 2011 - 23:09
Ils seront capturés, tout comme le HTV japonais. Reste donc a espérer que le RMS d'ISS ne tombera pas en panne ces 9 prochaines années.patchfree a écrit:Question car je n'ai pas bien compris: les cargos
COTS s'arrimeront (si oui où) ou seront capturés par le bras robotique
et mis en place sur l'ISS?
Heureusement l'ATV et les Progress sont autonomes. Peut être que si le RMS est HS on pourra envisager une augmentation des ATV (financés par les américains et les japonais).

Mustard- Admin

- Messages : 32370
Inscrit le : 16/09/2005
Age : 55
Localisation : Rouen/Normandie -
Re: Transport de fret par l'industrie privée
Mer 27 Juil 2011 - 12:24
Pour ce qui est de cette fusion des deux vols de qualification souhaitée par Space X et approuvée par la NASA (bien que les finasseries dans les tournures de phrase ne soient pas toujours évidentes à décoder) .... il restera quand même à obtenir un accord des autres partenaires (ce que généralement les journalistes occultent systématiquement comme si l'ISS était purement et simplement américaine).
Ils seront probablement convaincus par les preuves apportées par à la fois Space X et la NASA qui se porte garante .... mais il faudra quand même que cette formalité soit remplie.
Un lancer par la Falcon 9, les manoeuvres d'approche et d'amarrage du cargo Dragon ... cela fait beaucoup de nouveautés d'un seul coup.
Comme cela a été signalé transporter du fret en HTV ou ATV serait sans doute possible (pas en Progress car interdit par le Congrès). Mais c'est encore de l'argent qui sort du circuit US ... s'ils peuvent l'éviter c'est clair que la solution de "qualification à marche forcée" du matériel de SPACE X sera préférée. L'autre possibilité éventuelle c'est le "troc" : échanger un tonnage de fret avec les partenaires japonais et/ou européens contre du temps de vol supplémentaire pour leurs astronautes. Pas forcément un mauvais "bargain" AMHA.
Ils seront probablement convaincus par les preuves apportées par à la fois Space X et la NASA qui se porte garante .... mais il faudra quand même que cette formalité soit remplie.
Un lancer par la Falcon 9, les manoeuvres d'approche et d'amarrage du cargo Dragon ... cela fait beaucoup de nouveautés d'un seul coup.
Comme cela a été signalé transporter du fret en HTV ou ATV serait sans doute possible (pas en Progress car interdit par le Congrès). Mais c'est encore de l'argent qui sort du circuit US ... s'ils peuvent l'éviter c'est clair que la solution de "qualification à marche forcée" du matériel de SPACE X sera préférée. L'autre possibilité éventuelle c'est le "troc" : échanger un tonnage de fret avec les partenaires japonais et/ou européens contre du temps de vol supplémentaire pour leurs astronautes. Pas forcément un mauvais "bargain" AMHA.
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Transport de fret par l'industrie privée
Mer 27 Juil 2011 - 14:35
Et ça fait moins de nouveauté d'un seul coup que les précédents partenaires (HTV, ATV, Progress numérique ...) qui sont allés directement s'arrimer à l'ISS.montmein69 a écrit:Un lancer par la Falcon 9, les manoeuvres d'approche et d'amarrage du cargo Dragon ... cela fait beaucoup de nouveautés d'un seul coup.
On en demande plus à SpaceX qu'à n'importe quel autre partenaire.

Exocet- Messages : 623
Inscrit le : 03/12/2010
Age : 52
Localisation : Fra/De/FL/TX
Re: Transport de fret par l'industrie privée
Mer 27 Juil 2011 - 14:47
Mustard a écrit:Reste donc a espérer que le RMS d'ISS ne tombera pas en panne ces 9 prochaines années.
Un jour j'avais émis cette hypothèse sur NasaSpaceFlight, un mec m'avait pris de haut en m'expliquant que cela ne POUVAIT PAS arriver ! :D
Il en avait profité au passage pour m'expliquer ce qu'était le métier d'ingénieur, qu'il connait visiblement beaucoup mieux que moi...
_________________
Kosmonavtika - Le site de l'Espace russe

nikolai39- Admin
- Messages : 11243
Inscrit le : 15/05/2006
Age : 39
Localisation : Loiret -
Re: Transport de fret par l'industrie privée
Mer 27 Juil 2011 - 14:51
Il est vrai que la méthode de soft-docking (ou "berthing") présente un risque en cas d'avarie du bras, mais d'un autre coté il est impossible de faire un hard-docking sur les CBM qui sont les seules écoutilles par lesquels peuvent passer les racks.
Exocet- Messages : 623
Inscrit le : 03/12/2010
Age : 52
Localisation : Fra/De/FL/TX
Re: Transport de fret par l'industrie privée
Jeu 28 Juil 2011 - 19:36
Exocet a écrit:d'un autre coté il est impossible de faire un hard-docking sur les CBM qui sont les seules écoutilles par lesquels peuvent passer les racks.
Qu'est ce qui limite (donc rend impossible) ce docking sur un CBM en guidage automatique complet ? C'est irrémédiable ou on pourrait envisager de faire évoluer ?
Dans cet article de NSF, on relate les tests effectués à partir d'Atlantis pour un guidage d'approche du système qui devrait équiper le Cygnus d'Orbital. Le système utilise un LIDAR et de la reconnaissance de forme.
Une telle technologie ne peut-elle évoluer encore pour un guidage au-delà de la "box" de capture par le bras ? (je parle sans prendre en compte le coût de développement et les équipements supplémentaires qu'il faudrait implémanter sur les capsules -donc augmenter leur coût-)Demonstrate Rendezvous and Docking (AR&D) sensor technology that does not require cooperative targets.TriDAR provides 6 degree of freedom relative position and attitude without using reflectors. Operates by matching 3D data from a LIDAR to the known shape of the ISS
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Transport de fret par l'industrie privée
Jeu 28 Juil 2011 - 21:37
montmein69 a écrit:Exocet a écrit:d'un autre coté il est impossible de faire un hard-docking sur les CBM qui sont les seules écoutilles par lesquels peuvent passer les racks.
Qu'est ce qui limite (donc rend impossible) ce docking sur un CBM en guidage automatique complet ? C'est irrémédiable ou on pourrait envisager de faire évoluer ?
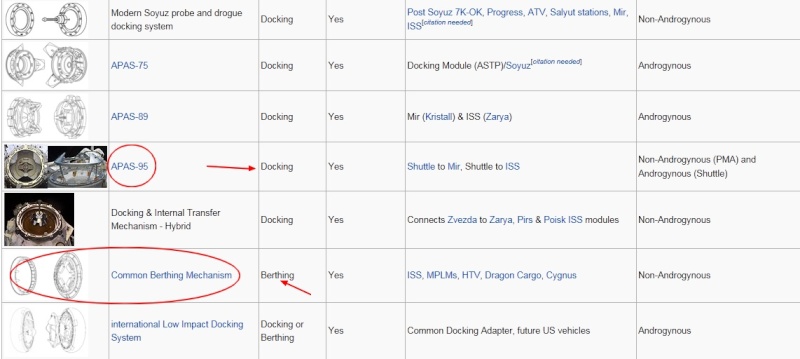
Je suppose que le TRIDAR n'aura aucun rôle à jouer lors d'un "Cygnus-berthing to CBM" à proprement dit. Tridar ne serait indispensable que jusqu'au "berthing", a priori. ( à tout de même confirmer...) Ce que voulait dire Exocet, c’est AMHA qu'un CBM (common berthing méchanism), n’est pas conçu pour un amarrage en « tout-auto », voilà tout. D'ailleurs, selon cette classification trouvée sur le web, un CBM n’est pas conçu pour du docking mais pour du berthing, (l'aide d'un bras robot est indispensable). Un accostage à ce type de connexions doit se faire en manuel uniquement…et surtout en douceur…d’où la potentielle utilisation du RMS, pour amarrer un HTV jap, une dragon et le futur cygnus en question.
Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Re: Transport de fret par l'industrie privée
Jeu 28 Juil 2011 - 23:16
Sidjay a écrit:montmein69 a écrit:Exocet a écrit:d'un autre coté il est impossible de faire un hard-docking sur les CBM qui sont les seules écoutilles par lesquels peuvent passer les racks.
Qu'est ce qui limite (donc rend impossible) ce docking sur un CBM en guidage automatique complet ? C'est irrémédiable ou on pourrait envisager de faire évoluer ?Je suppose que le TRIDAR n'aura aucun rôle à jouer lors d'un "Cygnus-berthing to CBM" à proprement dit. Tridar ne serait indispensable que jusqu'au "berthing", a priori. ( à tout de même confirmer...) Ce que voulait dire Exocet, c’est AMHA qu'un CBM (common berthing méchanism), n’est pas conçu pour un amarrage en « tout-auto », voilà tout. D'ailleurs, selon cette classification trouvée sur le web, un CBM n’est pas conçu pour du docking mais pour du berthing, (l'aide d'un bras robot est indispensable). Un accostage à ce type de connexions doit se faire en manuel uniquement…et surtout en douceur…d’où la potentielle utilisation du RMS, pour amarrer un HTV jap, une dragon et le futur cygnus en question.
Peux-tu me donner l'adresse du tableau publié ci-dessus: il est ici un petit peu petit pour mes yeux et comme il est très chouette je voudrais bien le récupérer... Merci.
patchfree- Messages : 6152
Inscrit le : 19/04/2007
Age : 69
Localisation : Poitiers -
Re: Transport de fret par l'industrie privée
Jeu 28 Juil 2011 - 23:57
Bien entendu patchfree, le voici: http://en.wikipedia.org/wiki/Spacecraft_docking_and_berthing_mechanism
:D
:D
Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 11:28
Bon .... d'accord .... pour le berthing, cela n'a d'ailleurs qu'une importance relative pour un cargo de fret. Mais je suis dubitatif sur l'impossibilité totale puisque la navette était guidée (certes en pilotage manuel) et s'arrimait sans avoir recours au bras. Le problème majeur me semble être que la NASA n'a pas de système de docking automatique opérationnel à ce jour.
Donc si on suit la logique présentée
alors si on pense aux futures capsules d'équipage US ..... seront-ils aussi tributaires du bras pour arriver à bon port ?
Il me parait assez inconcevable que les américains ne développent pas un système de guidage pour faire du docking de leurs capsules habitées.
Donc si on suit la logique présentée
Sidjay a écrit:un CBM n’est pas conçu pour du docking mais pour du berthing, (l'aide d'un bras robot est indispensable).
alors si on pense aux futures capsules d'équipage US ..... seront-ils aussi tributaires du bras pour arriver à bon port ?
Il me parait assez inconcevable que les américains ne développent pas un système de guidage pour faire du docking de leurs capsules habitées.
Dernière édition par montmein69 le Ven 29 Juil 2011 - 11:37, édité 1 fois
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 11:36
Une solution d'avenir serait sans doute le dernier port du tableau

Mais ce sera du post-ISS (s'il y en a un) car il est sans doute impossible d'installer cela sur la station.
Mais ce sera du post-ISS (s'il y en a un) car il est sans doute impossible d'installer cela sur la station.
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 11:49
Ce ne sont que des cargos (même si un risque de collision de même type que celui de progress avec Mir peut se produire). Ce n'est que de l'argent.montmein69 a écrit:
On espère que le souhait d'aller vite .... ne négligera pas de prendre le temps nécessaire et toutes les précautions pour que tout se passe bien :suspect:
Un peu moins d'études et un peu plus d'action ferait pourtant baisser l'addition.
Je trouve dommage toutes les précautions prises de nos jours et regrette les prises de risques mesurées des années 60.

vp- Messages : 4559
Inscrit le : 21/09/2005
Age : 50
Localisation : RP
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 11:59
vp a écrit:
Ce ne sont que des cargos (même si un risque de collision de même type que celui de progress avec Mir peut se produire). Ce n'est que de l'argent.
Un peu moins d'études et un peu plus d'action ferait pourtant baisser l'addition.
Je trouve dommage toutes les précautions prises de nos jours et regrette les prises de risques mesurées des années 60.
Il y a quand même six hommes dans la station. Un choc qui mettrait à mal l'étanchéité d'une zone de l'ISS ... n'est pas totalement sans risque pour eux. Et si c'est la zone de berthing ou le bras qui est HS ... cela perturberait pas mal la suite des opérations.
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 18:16
Oui.montmein69 a écrit:vp a écrit:
Ce ne sont que des cargos (même si un risque de collision de même type que celui de progress avec Mir peut se produire). Ce n'est que de l'argent.
Un peu moins d'études et un peu plus d'action ferait pourtant baisser l'addition.
Je trouve dommage toutes les précautions prises de nos jours et regrette les prises de risques mesurées des années 60.
Il y a quand même six hommes dans la station. Un choc qui mettrait à mal l'étanchéité d'une zone de l'ISS ... n'est pas totalement sans risque pour eux. Et si c'est la zone de berthing ou le bras qui est HS ... cela perturberait pas mal la suite des opérations.
Mais si je mets de la mauvaise foi, je dire qu'il vaut mieux rien faire, c'est moins dangereux. :lolnasa:
vp- Messages : 4559
Inscrit le : 21/09/2005
Age : 50
Localisation : RP
Re: Transport de fret par l'industrie privée
Ven 29 Juil 2011 - 19:50
vp a écrit:
Je trouve dommage toutes les précautions prises de nos jours et regrette les prises de risques mesurées des années 60.
En ce qui concerne des "rendez-vous" automatisés n'impliquant pas une présence humaine, certes trop de précautions peu ralentir les programmes. En revanche, un arrimage de cargo avec ISS, cela devient du "vol habité". Les vols spatiaux des années 60 ont émergés avec un principe de précaution bien moins contraignant que de nos jours, c'est sûr. L'époque le voulait, il y avait un leadership à gagner ou à conserver dans un environnement de confrontation Est-Ouest. La "guerre" froide reste une guerre. A ce titre, pas le temps de pavoiser ! Maintenant, conserver cette même "fraicheur" dans la prise de risque serait très mal accepté par les opinions publiques. Les temps ont changé et même pour des programmes spatiaux privés, l'accident ou la tragédie n'est pas envisageable. Donc effectivement, tout va très lentement ...

DGFIP- Messages : 892
Inscrit le : 11/09/2009
Age : 57
Localisation : La Roche Chalais
Re: Transport de fret par l'industrie privée
Sam 30 Juil 2011 - 13:45
A ce jour nous savons que les futurs vaisseaux cargos du COTS, devront êtres attachés à la station, en « accostage manuel » ou « berthing », par le biais du SSRMS de cette dernière.
En toute logique, un accostage automatisé ne doit être valable que si le système amarrage est qualifié à cet effet. Pour la future capsule Dragon-Cargo ou pour cygnus (qui devront tout comme l'HTV japonais ou un MPLM Thales alenia-space, être amarrés sur un systeme CBM (common berthing mechanism), du fait que d'imposantes charges utiles devront entrer-sortir), il s’agira bien de « berthing », via ISS-SSRMS et vers un port CBM. Il avait été évoqué à juste titre, quelques propos au sujet du « potentiel-panne » de cet outil de manipulation, au combien nécessaire. Certains proclament outre-atlantique qu’il ne tombera jamais en panne, d’autres comme Mustard ou Nicolai, restent un peu plus sceptique à ce propos…. Je me joins à eux, en ayant tout de même pris en compte le facteur-redondance, alloué à ce dernier....Franchement, ils n'ont pas lésiné la redondance sur ce bras robot...
En termes de redondance, le SSRMS est alimenté en électricité par deux réseaux séparées qui sont fonctionnellement identiques.
Il est clair que dans le cas où une défaillance électrique soit détectée sur l’un de ces deux réseaux, cela provoquerait inévitablement « une perte à durée indéterminée» pour ce réseau en question, il n’en restera plus qu’un seul de dispo, pour pouvoir bosser. La seconde ligne peut encore être utilisée pour les opérations du SSRMS.
Dans le cas où un échec critique implique directement le SSRMS, et donc l’une de ses sections « ORU » (orbital replacment unit), ce dernier sera automatiquement placé dans un état de sûreté dit (brake-on). Un système de verrouillage situé à chaque extrémités du SSRMS appelé LEE (Latching End effector) peut transférer du courant électrique au bras depuis une des bornes spécifiques, appelées « bornes électromécaniques » PGDF, (PDGF, power data grapple fixture). (souvent les astronautes de la stations déplacent le bras d’un point à un autre de la station, via ce système LEE+PGDF) La gamme d'accessibilité du SSRMS n’est limitée que seulement par le nombre de PDGF stratégiquement installés au préalable sur la station. Un autre système redondant est également situé dans chacune des deux LEE.
Contrairement au Canadarm-shuttle, le SSRMS est conçu pour de longs séjours dans l'espace. Cette exigence nécessite donc une caractéristique de conception novatrice qui permet aux astronautes de pouvoir le réparer directement sur orbite. Le SSRMS est construit par sections. Là est sont avantage, puisque ces sections « sections ORU » (orbital replacment unit), sont facilement démontables et remplaçables par un astronaute ou par le Manipulateur robot, DEXTRE.
ISS-SSRMSEn toute logique, un accostage automatisé ne doit être valable que si le système amarrage est qualifié à cet effet. Pour la future capsule Dragon-Cargo ou pour cygnus (qui devront tout comme l'HTV japonais ou un MPLM Thales alenia-space, être amarrés sur un systeme CBM (common berthing mechanism), du fait que d'imposantes charges utiles devront entrer-sortir), il s’agira bien de « berthing », via ISS-SSRMS et vers un port CBM. Il avait été évoqué à juste titre, quelques propos au sujet du « potentiel-panne » de cet outil de manipulation, au combien nécessaire. Certains proclament outre-atlantique qu’il ne tombera jamais en panne, d’autres comme Mustard ou Nicolai, restent un peu plus sceptique à ce propos…. Je me joins à eux, en ayant tout de même pris en compte le facteur-redondance, alloué à ce dernier....Franchement, ils n'ont pas lésiné la redondance sur ce bras robot...
En termes de redondance, le SSRMS est alimenté en électricité par deux réseaux séparées qui sont fonctionnellement identiques.
Il est clair que dans le cas où une défaillance électrique soit détectée sur l’un de ces deux réseaux, cela provoquerait inévitablement « une perte à durée indéterminée» pour ce réseau en question, il n’en restera plus qu’un seul de dispo, pour pouvoir bosser. La seconde ligne peut encore être utilisée pour les opérations du SSRMS.
Dans le cas où un échec critique implique directement le SSRMS, et donc l’une de ses sections « ORU » (orbital replacment unit), ce dernier sera automatiquement placé dans un état de sûreté dit (brake-on). Un système de verrouillage situé à chaque extrémités du SSRMS appelé LEE (Latching End effector) peut transférer du courant électrique au bras depuis une des bornes spécifiques, appelées « bornes électromécaniques » PGDF, (PDGF, power data grapple fixture). (souvent les astronautes de la stations déplacent le bras d’un point à un autre de la station, via ce système LEE+PGDF) La gamme d'accessibilité du SSRMS n’est limitée que seulement par le nombre de PDGF stratégiquement installés au préalable sur la station. Un autre système redondant est également situé dans chacune des deux LEE.
Contrairement au Canadarm-shuttle, le SSRMS est conçu pour de longs séjours dans l'espace. Cette exigence nécessite donc une caractéristique de conception novatrice qui permet aux astronautes de pouvoir le réparer directement sur orbite. Le SSRMS est construit par sections. Là est sont avantage, puisque ces sections « sections ORU » (orbital replacment unit), sont facilement démontables et remplaçables par un astronaute ou par le Manipulateur robot, DEXTRE.
Dernière édition par Sidjay le Dim 31 Juil 2011 - 15:42, édité 3 fois
Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Re: Transport de fret par l'industrie privée
Sam 30 Juil 2011 - 14:13
Il s'agit de contraintes mécaniques, et d'alignement, qui le rendent incompatible avec un arrimage automatique.montmein69 a écrit:Qu'est ce qui limite (donc rend impossible) ce docking sur un CBM en guidage automatique complet ? C'est irrémédiable ou on pourrait envisager de faire évoluer ?
Oui c'est envisageable, mais pas sur un CBM.montmein69 a écrit:Une telle technologie ne peut-elle évoluer encore pour un guidage au-delà de la "box" de capture par le bras ? (je parle sans prendre en compte le coût de développement et les équipements supplémentaires qu'il faudrait implémanter sur les capsules -donc augmenter leur coût-)
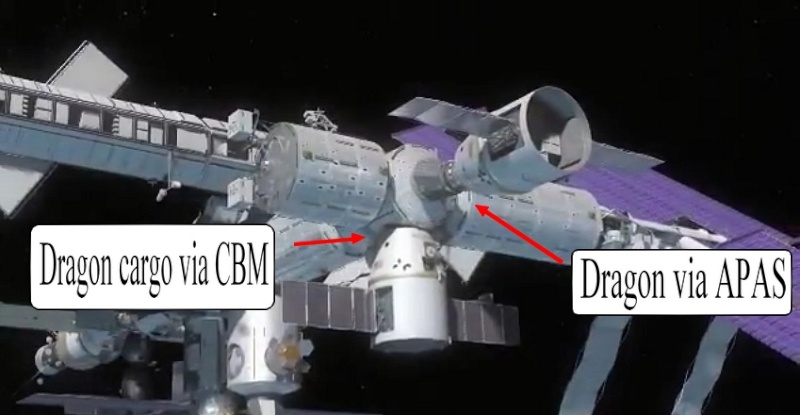
Attention la navette se s’arrime pas aux ports CBM mais sur un port APAS (comme présenté sur le tableau de Sidjay), et pour être précis cette amarrage se fait via un adaptateur PMA qui fait l'adaptation entre un port CBM et un port APAS :montmein69 a écrit:Bon .... d'accord .... pour le berthing, cela n'a d'ailleurs qu'une importance relative pour un cargo de fret. Mais je suis dubitatif sur l'impossibilité totale puisque la navette était guidée (certes en pilotage manuel) et s'arrimait sans avoir recours au bras. Le problème majeur me semble être que la NASA n'a pas de système de docking automatique opérationnel à ce jour.
http://en.wikipedia.org/wiki/Pressurized_Mating_Adapter
Exocet- Messages : 623
Inscrit le : 03/12/2010
Age : 52
Localisation : Fra/De/FL/TX
Re: Transport de fret par l'industrie privée
Sam 30 Juil 2011 - 14:32
Et par conséquent coûte plus cher !DGFIP a écrit:... Donc effectivement, tout va très lentement ...vp a écrit:
Je trouve dommage toutes les précautions prises de nos jours et regrette les prises de risques mesurées des années 60.
Il est difficile de concilier "sans risque" et "pas cher".
vp- Messages : 4559
Inscrit le : 21/09/2005
Age : 50
Localisation : RP
Re: Transport de fret par l'industrie privée
Sam 30 Juil 2011 - 15:12
En bref: L’équipage du prochain Soyouz (TMa22), qui partira vers la Station spatiale internationale le 22 septembre prochain, à intégré une formation supplémentaire dans son flux de préparation à la mission, depuis le 27 juillet dernier.Pour infos, Dan Burbank, 50 ans, Anton Shkaplerov 39 ans, et Anatoly Ivanishin 42 ans, se joindront à l'expédition 29 et burbank prendra le comandement de l'ISS. L’équipage du Tma22, à donc fait un « stop » en Californie, dans l'objectif de se familiariser avec les systèmes de la capsule de fret "Dragon", conçue par Space-X. Son lancement serait maintenant prévue pour une mission combinée COTS2/3, établie au 30.12.2011.
Unarrimage accostage réussi pour la capsule (SpaceX) Dragon pourrait ouvrir la voie aux 12 autres vols de ravitaillement-NASA dés 2012. Burbank, signale que l'équipage a également reçu une formation sur l'accostage de la capsule Cygnus, étant donné qu’elle serait annoncée pour le début de 2012, (probablement avant même que Burbank et ses coéquipiers ne retournent sur Terre, aux environs de mi-mars). Pour rappel, Orbital Sciences corp. détient un second contrat-NASA, pour le réapprovisionnement d’ISS avec notamment huit vols Cygnus de signés. Les deux cargos devraient êtres accostés au nod Harmony, par le biais du bras robotique de la station, à l’issue d’une manœuvre semblable à l'accostage des capsules HTV japonais, selon Burbank.
ici
Un
ici
https://www.youtube.com/watch?v=2w3hPA4WpNE&feature=related
Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Cygnus - Taurus II & COTS/CRS
Ven 19 Aoû 2011 - 16:52
Cela prend tournure. Orbital nous fait le point de son projet de cargo CYGNUS et du lanceur Taurus-II dans le cadre COTS.
Voyez en anglais le message de la NASA à ce sujet : http://www.orbital.com/CargoResupplyServices/ .
Voyez en anglais le message de la NASA à ce sujet : http://www.orbital.com/CargoResupplyServices/ .
Astro-notes- Messages : 17239
Inscrit le : 12/04/2006
Age : 82
Localisation : Corse du Sud -
Re: Transport de fret par l'industrie privée
Ven 19 Aoû 2011 - 17:05
Très encourageant pour cygnus et donc pour les missions d'envoi fret vers ISS, par le biais de l'industrie privé!
Le Q4 de 2011 indiquerait que nous pourrions désormais assister à un vol-test Taurus-Cygnus pour fin 2011? intéressant! Notons néanmoins que ce vol-test à été légèrement repoussé dans son planning, car il était prévu en (début de Q4/2011) lors de l'update d'avril, tout comme le vol COTS de DEMO (qui a été repoussé en Q1 de 2012)...ça peut-encore bouger...
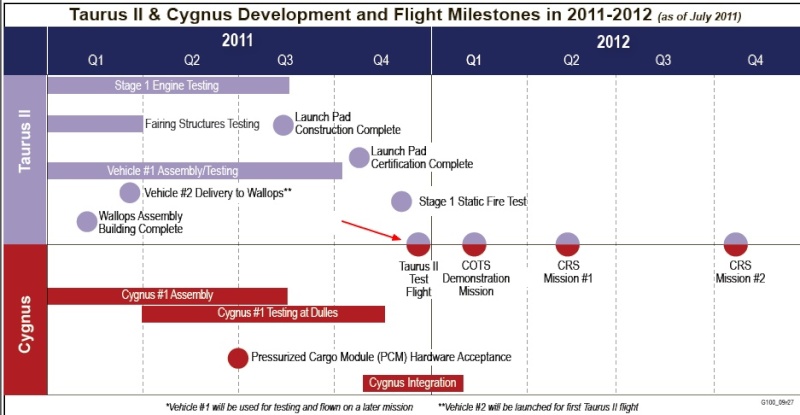
Le Q4 de 2011 indiquerait que nous pourrions désormais assister à un vol-test Taurus-Cygnus pour fin 2011? intéressant! Notons néanmoins que ce vol-test à été légèrement repoussé dans son planning, car il était prévu en (début de Q4/2011) lors de l'update d'avril, tout comme le vol COTS de DEMO (qui a été repoussé en Q1 de 2012)...ça peut-encore bouger...
Dernière édition par Sidjay le Ven 19 Aoû 2011 - 17:36, édité 9 fois
Sidjay- Messages : 17121
Inscrit le : 05/04/2009
Age : 43
Localisation : R.P
Re: Transport de fret par l'industrie privée
Ven 19 Aoû 2011 - 17:07
Pour agrémenter mon précédent post que je n'ai pas eu le temps de traduire (aie apologize), voici une petite vidéo animation montrant une mission Taurus II Cygnus vers l'ISS :
http://www.orbital.com/video/CygnusMissionOverview/video.html
Cela se passe de commentaire.
http://www.orbital.com/video/CygnusMissionOverview/video.html
Cela se passe de commentaire.
Astro-notes- Messages : 17239
Inscrit le : 12/04/2006
Age : 82
Localisation : Corse du Sud -
Page 1 sur 3 • 1, 2, 3

 Sujets similaires
Sujets similaires» Participation du secteur privé à l'exploration lunaire
» Etat réel de l'industrie spatiale russe ?
» Astéroïde propriété privée Américaine ?
» Comment gérer la phase de sélection pour COTS 2 (missions fret/ISS) ?
» Nouveau contrat CRS-2 (ravitaillement fret ISS)
» Etat réel de l'industrie spatiale russe ?
» Astéroïde propriété privée Américaine ?
» Comment gérer la phase de sélection pour COTS 2 (missions fret/ISS) ?
» Nouveau contrat CRS-2 (ravitaillement fret ISS)
Page 1 sur 3
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum