
L'Hexapode ... futur robot martien ?
Page 1 sur 1



 L'Hexapode ... futur robot martien ?
L'Hexapode ... futur robot martien ?
 Mar 27 Nov 2007 - 16:45
Mar 27 Nov 2007 - 16:45
Je suis tombé par hasard sur cette machine qui doit être fabriquée par John Deere.
Cela semble plutôt prometteur .....

L'engin en action :
https://www.youtube.com/watch?v=CD2V8GFqk_Y
https://www.youtube.com/watch?v=CgBNjdwYdvE&feature=related
Cela semble plutôt prometteur .....
L'engin en action :
https://www.youtube.com/watch?v=CD2V8GFqk_Y
https://www.youtube.com/watch?v=CgBNjdwYdvE&feature=related

montmein69- Donateur

- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise

Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 17:03
Cela me rappelle vaguement quelque chose d'un réalisateur assez méconnu  :lol!: ;)
:lol!: ;)
N'empêche une superbe machine (l'hexapode bucheron)
:lol!: ;) N'empêche une superbe machine (l'hexapode bucheron)

Apolloman- Donateur
- Messages : 11752
Inscrit le : 20/04/2006
Age : 48
Localisation : Lédignan (30 Gard) France -

Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 18:02
Visiblement développée pour éviter l'arrachage de la végétation de surface, contrairement aux véhicules sur roues ou aux véhicules chenillés, mais apparemment beaucoup plus lente. Mais des progrès sont possibles (cf. les robots hexapodes dont on a déjà parlé dans un sujet, et dont la démarche s'améliore sur la base d'un algorithme évolutif)
_________________
Les fous ouvrent les voies qu'empruntent ensuite les sages. (Carlo Dossi)

Henri- Modérateur

- Messages : 4879
Inscrit le : 22/09/2005
Age : 68
Localisation : Strasbourg, France -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 19:23
Henri a écrit:Visiblement développée pour éviter l'arrachage de la végétation de surface...
Oui c'est sur qu'avec une si petite surface d'appui, cela fait beaucoup moins de dégats que des chenilles (voir des grosses roues)
Apolloman- Donateur
- Messages : 11752
Inscrit le : 20/04/2006
Age : 48
Localisation : Lédignan (30 Gard) France -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 19:58
Apolloman a écrit:Oui c'est sur qu'avec une si petite surface d'appui, cela fait beaucoup moins de dégâts que des chenilles (voir des grosses roues)Henri a écrit:Visiblement développée pour éviter l'arrachage de la végétation de surface...
Je dirais pas que c'est la petitesse de la surface d'appui qui limitera les dégâts (au contraire, ça augmente la pression aux points d'appui), mais plutôt le fait que les pattes se posent relativement en douceur et surtout qu'elles n'arrachent pas le sol lorsqu'elles le quittent, à l'inverse des chenilles.
Dernière édition par le Mar 27 Nov 2007 - 20:00, édité 2 fois

Skyboy- Messages : 2167
Inscrit le : 05/10/2006
Age : 43
Localisation : 46°48'N-71°23'O -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 19:59
Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Plus que la rapidité, c'est la sûreté du déplacement qui serait alors recherchée.
Je suis persuadé qu'en y mettant les cervelles et les crédits suffisants, la robotique peut significativement progresser. Et que ce soit en fonctionnement autonome ou en appui (indispensable) d'un équipage, cela sera tout benef
Plus que la rapidité, c'est la sûreté du déplacement qui serait alors recherchée.
Je suis persuadé qu'en y mettant les cervelles et les crédits suffisants, la robotique peut significativement progresser. Et que ce soit en fonctionnement autonome ou en appui (indispensable) d'un équipage, cela sera tout benef
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 20:03
montmein69 a écrit:Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Plus que la rapidité, c'est la sûreté du déplacement qui serait alors recherchée.
Je suis persuadé qu'en y mettant les cervelles et les crédits suffisants, la robotique peut significativement progresser. Et que ce soit en fonctionnement autonome ou en appui (indispensable) d'un équipage, cela sera tout benef
Tu lis ça Skyboy... Allez ZOU au boulot ;)
Apolloman- Donateur
- Messages : 11752
Inscrit le : 20/04/2006
Age : 48
Localisation : Lédignan (30 Gard) France -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 21:02
Je suis déjà dessus depuis 3 ans, chef !!! :study: (On avait pas un smiley avec un garde à vous ?)Apolloman a écrit:montmein69 a écrit:Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Plus que la rapidité, c'est la sûreté du déplacement qui serait alors recherchée.
Je suis persuadé qu'en y mettant les cervelles et les crédits suffisants, la robotique peut significativement progresser. Et que ce soit en fonctionnement autonome ou en appui (indispensable) d'un équipage, cela sera tout benef
Tu lis ça Skyboy... Allez ZOU au boulot ;)
Skyboy- Messages : 2167
Inscrit le : 05/10/2006
Age : 43
Localisation : 46°48'N-71°23'O -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 21:16
Y'a mon avatar si tu veux, Marvin le martien qui a pas trop de chance avec Bugs Bunny ;)Skyboy a écrit:Je suis déjà dessus depuis 3 ans, chef !!! :study: (On avait pas un smiley avec un garde à vous ?)


Invité- Invité
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 21:42
Je ne dirais pas ça, bien au contraire. C'est trop compliqué, trop lent, pas assez stable ! Il suffit que le robot prenne appui sur un caillou branlant qui finit par rouler pour que .....montmein69 a écrit:Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Bien sûr, il peut y avoir des progrès, mais pour se rétablir en temps réel quand le pied se dérobe, ça ne me parait pas évident, mais alors pas évident du tout, surtout en terrain accidenté. D'ailleurs, je ne conseille pas le terrain trop accidenté car il y a un autre risque, c'est celui de coincer un pied entre 2 petits rochers ou dans une petite faille. Et je ne parle pas de la consommation énergétique pour avancer ...
AMHA, ne comptez pas sur la NASA pour développer ce concept pour les futures missions ....
Les rovers à roues ont encore de l'avenir à mon avis.
Cordialement,
Argyre
Argyre- Messages : 3397
Inscrit le : 31/01/2006
Age : 58
Localisation : sud-ouest
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 21:42
:lol!: , y'a de quoi faire un very very very beau smilley

zx- Messages : 2650
Inscrit le : 02/12/2005
Age : 63
Localisation : Loir et Cher
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 21:56
Skyboy a écrit: Je suis déjà dessus depuis 3 ans, chef !!! :study: (On avait pas un smiley avec un garde à vous ?)
Tu as oublier un truc:
Chef!! Je suis déjà dessus depuis 3 ans, chef!!!
Apolloman- Donateur
- Messages : 11752
Inscrit le : 20/04/2006
Age : 48
Localisation : Lédignan (30 Gard) France -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 22:40
En terrain très accidenté, la bipédie, la quadrupédie ou l'hexapédie permettent seules de progresser, alors que les roues ou les chenilles sont vite recalées. Mais les exigences des algorithmes de mimétisme du comportement locomoteur animal sont d'autant plus difficiles à satisfaire que le nombre de pattes diminue… (arc-reflexes, sensation du terrain, équilibre, coordination, etc…) Pour résumer, il y a encore un sacré boulot à faire avant que les machines bipèdes et quadrupèdes imaginées par Georges Lucas se baladent dans nos campagnes, nos montagnes ou ailleurs…Argyre a écrit:Je ne dirais pas ça, bien au contraire. C'est trop compliqué, trop lent, pas assez stable ! Il suffit que le robot prenne appui sur un caillou branlant qui finit par rouler pour que .....montmein69 a écrit:Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Bien sûr, il peut y avoir des progrès, mais pour se rétablir en temps réel quand le pied se dérobe, ça ne me parait pas évident, mais alors pas évident du tout, surtout en terrain accidenté. D'ailleurs, je ne conseille pas le terrain trop accidenté car il y a un autre risque, c'est celui de coincer un pied entre 2 petits rochers ou dans une petite faille. Et je ne parle pas de la consommation énergétique pour avancer ...
AMHA, ne comptez pas sur la NASA pour développer ce concept pour les futures missions ....
Les rovers à roues ont encore de l'avenir à mon avis.
Cordialement,
Argyre
_________________
Les fous ouvrent les voies qu'empruntent ensuite les sages. (Carlo Dossi)
Henri- Modérateur
- Messages : 4879
Inscrit le : 22/09/2005
Age : 68
Localisation : Strasbourg, France -
Re: L'Hexapode ... futur robot martien ?
Mar 27 Nov 2007 - 23:08
Mais on y arrivera ! Argyre, la locomotion ça ne demande pas une intelligence artificielle inaccessible ! On ne veut pas faire des robots complètement autonomes, mais juste des robots qui savent tâter le terrain et adapter le mouvement de leurs pattes en fonction d'une direction à suivre (donnée par l'homme avec plus ou moins de détails) et des paramètres de masses/solidité du terrain/configuration du robot.Henri a écrit:En terrain très accidenté, la bipédie, la quadrupédie ou l'hexapédie permettent seules de progresser, alors que les roues ou les chenilles sont vite recalées. Mais les exigences des algorithmes de mimétisme du comportement locomoteur animal sont d'autant plus difficiles à satisfaire que le nombre de pattes diminue… (arc-reflexes, sensation du terrain, équilibre, coordination, etc…) Pour résumer, il y a encore un sacré boulot à faire avant que les machines bipèdes et quadrupèdes imaginées par Georges Lucas se baladent dans nos campagnes, nos montagnes ou ailleurs…Argyre a écrit:Je ne dirais pas ça, bien au contraire. C'est trop compliqué, trop lent, pas assez stable ! Il suffit que le robot prenne appui sur un caillou branlant qui finit par rouler pour que .....montmein69 a écrit:Cela montre aussi qu'il y a une alternative crédible (même s'il faudra encore beaucoup de progrès) pour aborder des terrains pentus ou présentant des surfaces irrégulières.
Bien sûr, il peut y avoir des progrès, mais pour se rétablir en temps réel quand le pied se dérobe, ça ne me parait pas évident, mais alors pas évident du tout, surtout en terrain accidenté. D'ailleurs, je ne conseille pas le terrain trop accidenté car il y a un autre risque, c'est celui de coincer un pied entre 2 petits rochers ou dans une petite faille. Et je ne parle pas de la consommation énergétique pour avancer ...
AMHA, ne comptez pas sur la NASA pour développer ce concept pour les futures missions ....
Les rovers à roues ont encore de l'avenir à mon avis.
Cordialement,
Argyre
La locomotion articulée, pour aller là où la locomotion à roue bloque, ça va se développer c'est sûr et certain !
Skyboy- Messages : 2167
Inscrit le : 05/10/2006
Age : 43
Localisation : 46°48'N-71°23'O -
Re: L'Hexapode ... futur robot martien ?
Mer 28 Nov 2007 - 0:09
Henri a écrit:En terrain très accidenté, la bipédie, la quadrupédie ou l'hexapédie permettent seules de progresser, alors que les roues ou les chenilles sont vite recalées.
La preuve pourrait-on dire ... nous et les autres animaux !
Sur le principe je suis d'accord, mais entre la théorie et la pratique ....
Je pense qu'il y a 2 critères à prendre en compte :skyboy a écrit:La locomotion articulée, pour aller là où la locomotion à roue bloque, ça va se développer c'est sûr et certain !
1) Jusqu'où peut-on aller avec un robot à roues ?
2) Jusqu'où peut-on aller avec un robot à pattes, pas d'un point de vue théorique (au mieux on refait un humain !), mais bien d'un point de vue pratique, c'est à dire en tenant compte de la complexité du problème ?
En fait, j'ai déjà programmé un hexapode en plastique (celui de Lynxmotion). Bon, ce n'est pas très représentatif, mais ça donne quelques idées sur ce qu'on peut faire avec ce genre de robots. C'est vrai qu'on peut passer par dessus certains obstacles, mais en même temps, il y a toujours un obstacle insurmontable tout bête, typiquement de la taille du robot. Or, avec des roues, ça peut passer si on prend des roues suffisamment grosses. Donc, en gros, pour un hexapode donné limité par certains obstacles, on peut trouver un rover de taille plus grosse qui, lui, passe .... et qui coûte beaucoup moins cher à concevoir !
En fait, je persiste à croire que ce genre de robots ne sera pas utilisé de sitôt dans les missions lunaires ou martiennes, car trop complexes : imaginez, 18 servomoteurs à gérer pour 6 pattes. Imaginez un peu les ingénieurs de la NASA recevant les images de l'hexapode et désirant que celui avance mais ne pose pas le pied à un certain endroit .... Faut-il dans ce cas éviter la commande d'avancement automatique et commander les moteurs 1 par 1 ?
Ou alors il faut le laisser avancer comme il veut ... avec tous les risques qu'il peut y avoir : coincer un pied, donner un coup dans une pierre, racler une pierre ... on oublie un peu vite la grande coordination sensorimotrice des animaux, acquise essentiellement par expérience, donc par un apprentissage complètement empirique ...
Ou alors il faut intégrer des techniques d'IA (apprentissage par expérience justement), le genre de truc qui marche pas mal, mais qui ne peut être testé exhaustivement, donc sans preuve de fonctionnement .... Ce serait une révolution si des ingénieurs acceptaient un tel software dans leur robot !
Remarquez, moi, je serais content de tenter de les programmer ces robots.
Cordialement,
Argyre
Argyre- Messages : 3397
Inscrit le : 31/01/2006
Age : 58
Localisation : sud-ouest
Re: L'Hexapode ... futur robot martien ?
Mer 28 Nov 2007 - 10:19
Plutot que de faire un lourd robot avec 6 pattes, pourquoi ne pas faire simplement un robot de type autogire ?

Un seul moteur, électrique, et avec les 1/3 de pesanteur terrestre ont pourrait avoir des déplacements interessant. Bien sûr il faudrait un système d'atterrissage autonome, et une possibilité de se déplacer par roue malgré tout. Dangereux je le reconnais mais en un vol on évite les rochers et sables mous.
Reste à savoir si la faible densité de l'air ambiant suffira à faire soulever l'engin
Un seul moteur, électrique, et avec les 1/3 de pesanteur terrestre ont pourrait avoir des déplacements interessant. Bien sûr il faudrait un système d'atterrissage autonome, et une possibilité de se déplacer par roue malgré tout. Dangereux je le reconnais mais en un vol on évite les rochers et sables mous.
Reste à savoir si la faible densité de l'air ambiant suffira à faire soulever l'engin

Mustard- Admin

- Messages : 32361
Inscrit le : 16/09/2005
Age : 55
Localisation : Rouen/Normandie -
Re: L'Hexapode ... futur robot martien ?
Mer 28 Nov 2007 - 11:28
Grosso modo, avec une pesanteur de 38% de celle de la Terre et une atmosphère 100 fois moins dense, il faudrait des pales qui tournent 6 fois plus vite que pour un hélico identique qui décolle du sol terrestre, mais on peut aussi augmenter la longueur des pales.Mustard a écrit:...Reste à savoir si la faible densité de l'air ambiant suffira à faire soulever l'engin
PS : un vieux bug du forum est de retour, la balise quote ne fonctionne plus en mode prévisualisation des posts...
_________________
Les fous ouvrent les voies qu'empruntent ensuite les sages. (Carlo Dossi)
Henri- Modérateur
- Messages : 4879
Inscrit le : 22/09/2005
Age : 68
Localisation : Strasbourg, France -
Re: L'Hexapode ... futur robot martien ?
Mer 28 Nov 2007 - 16:16
Argyre a écrit:[...]
Ou alors il faut le laisser avancer comme il veut ... avec tous les risques qu'il peut y avoir : coincer un pied, donner un coup dans une pierre, racler une pierre ... on oublie un peu vite la grande coordination sensorimotrice des animaux, acquise essentiellement par expérience, donc par un apprentissage complètement empirique ...
Ou alors il faut intégrer des techniques d'IA (apprentissage par expérience justement), le genre de truc qui marche pas mal, mais qui ne peut être testé exhaustivement, donc sans preuve de fonctionnement .... Ce serait une révolution si des ingénieurs acceptaient un tel software dans leur robot !
Remarquez, moi, je serais content de tenter de les programmer ces robots.
Cordialement,
Argyre
Effectivement, tout comme on est obligé d'accepter une fiabilité inférieure à 1 pour toute machine, fusée ou robot, les décideurs devront accepter le risque que leurs robots marcheurs se coincent un pied, donnent un coup dans une pierre ou autre. Cela peut d'ailleurs arriver à n'importe quel être humain (Qui n'est jamais tombé une seule fois dans sa vie parmi nous ?). Et effectivement, puisque les modèles "analytiques" qui intégreraient tous les paramètres (Configuration du robot interne/externe et configuration du l'environnement) n'existeront jamais, il faudra utiliser des techniques d'IA pour combler leur lacunes. Disons que le bas niveau sera fait avec des programmes classiques et que les exceptions et les commandes plus élaborées seront faites avec des techniques d'IA et donc de l'apprentissage !
Maintenant, la révolution sera effectivement lente et nécessitera que le coup d'envoi d'un objet dans l'espace baisse. Mais ne désespérons pas : Spirit et Opportunity, grâce à l'explosion imprévue de la durée de leur mission ont permis de tester en situation réelle des algorithmes de planification de trajectoire un peu plus autonomes que ceux initialement prévus. Je pense que maintenant qu'ils ont fait leurs preuves, on les utilisera plus souvent.
En fait, il n'y aura pas de révolution... juste une évolution naturelle et un déploiement lent des technologies qui sont encore aujourd'hui «avant-gardistes». Pour l'histoire de la taille du rover qui solutionne le problème de l'obstacle, le raisonnement ne tient pas : Les robots à locomotion articulée sont capable de grimper, donc il n'ont pas de limites théoriques de taille.
Dernier point, je pense même que la limite d'amélioration de la locomotion des robots se situe au delà de ce que peut faire l'être humain.
Skyboy- Messages : 2167
Inscrit le : 05/10/2006
Age : 43
Localisation : 46°48'N-71°23'O -
Re: L'Hexapode ... futur robot martien ?
Mer 28 Nov 2007 - 16:45
Ne peut-on pour les sauts d'obstacles, envisager que le robot aspire et compresse l'air martien dans un réservoir le temps nécessaire pendant une pause, puis l'expulse dans des tuyères bien orientées pour bondir par réaction au dessus? On peut aussi prévoir qu'il déploie un périscope avant le saut pour examiner ce qu'il y a plus loin.
Giwa- Donateur
- Messages : 12849
Inscrit le : 15/04/2006
Age : 81
Localisation : Draguignan
Re: L'Hexapode ... futur robot martien ?
Ven 4 Jan 2008 - 10:55
Pour une pratique du déplacement plus "terre à terre" , un projet référencé par Raoul.
Je reproduis son post :
Je reproduis son post :
Une super idée pour explorer!!
http://www.space.com/php/video/player.php?video_id=071214-robo-athlete
Le robot ATHLETE:
http://www-robotics.jpl.nasa.gov/systems/system.cfm?System=11
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: L'Hexapode ... futur robot martien ?
Ven 4 Jan 2008 - 11:03
Quelques images de l'engin ATHLETE (All-Terrain Hex-Legged Extra-Terrestrial Explorer) :


montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: L'Hexapode ... futur robot martien ?
Sam 24 Mai 2008 - 19:25
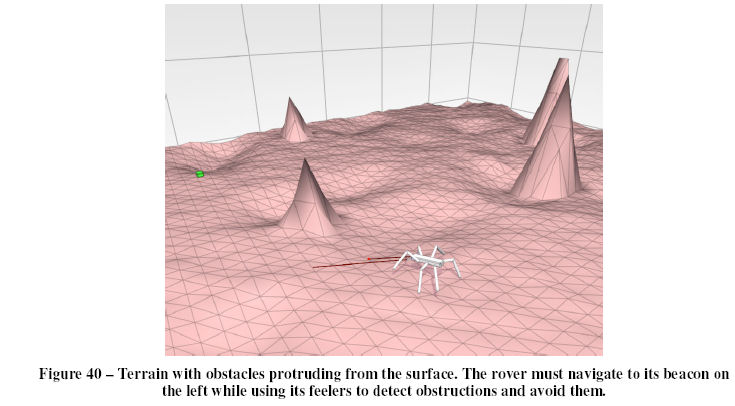
Une étude assez fouillée de la faisabilité d'un hexapode martien "Mars Walker" :
http://www.esa.int/gsp/ACT/doc/BIO/ACT-RPT-BIO-GSP-04L27a-BiomimeticsSpaceSystemDesign%20-%20CaseStudy1%20-%20MarsWalker.pdf
http://www.esa.int/gsp/ACT/doc/BIO/ACT-RPT-BIO-GSP-04L27a-BiomimeticsSpaceSystemDesign%20-%20CaseStudy1%20-%20MarsWalker.pdf
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: L'Hexapode ... futur robot martien ?
Lun 26 Mai 2008 - 17:02
Ah! Mais ça fesait longtemps que je n'avais présenter de poste ici. Alors...
Oublier le déplacement sur roue. Cette technologie est dépasser. Si les techniciens de la NASA et autres agence l'utilises encore c'est qu'ils n'en connaissent pas d'autres. Sur terrain plat pas trop accidenter cest parfait, comme ici sur Terre d'ailleurs. Mais dans toutes autres conditions improductif.
Le déplacement sur pattes est d'ailleur la seule configuration tout terrains envisageable. Et bon, la photo de départ ne doit être prise en compte que pour le concepte là ! Il s'agit d'une débusqueuse de montagne, Rien à voir avec l'exploration planétaire hein! Le model rechercheé une fourmi à articulation pneumatique...
Voilà c'est repartie
Oublier le déplacement sur roue. Cette technologie est dépasser. Si les techniciens de la NASA et autres agence l'utilises encore c'est qu'ils n'en connaissent pas d'autres. Sur terrain plat pas trop accidenter cest parfait, comme ici sur Terre d'ailleurs. Mais dans toutes autres conditions improductif.
Le déplacement sur pattes est d'ailleur la seule configuration tout terrains envisageable. Et bon, la photo de départ ne doit être prise en compte que pour le concepte là ! Il s'agit d'une débusqueuse de montagne, Rien à voir avec l'exploration planétaire hein! Le model rechercheé une fourmi à articulation pneumatique...
Voilà c'est repartie

Jean-Robert- Messages : 411
Inscrit le : 31/03/2007
Age : 63
Localisation : Québec,Canada
Re: L'Hexapode ... futur robot martien ?
Lun 26 Mai 2008 - 17:42
Jean-Robert a écrit:Oublier le déplacement sur roue. Cette technologie est dépasser. Si les techniciens de la NASA et autres agence l'utilises encore c'est qu'ils n'en connaissent pas d'autres.
Perso, je ne vendrais pas la peau de l'ours ...
Le déplacement sur roues comporte certes quelques limitations, mais
1) L'hexapode montré sur la photo ... a toujours des roues ! De manière générale, on n'utilise pas de roues montées simplement sur un chassis, on augmente les degrés de liberté de manière à pouvoir lever les roues et franchir des obstacles relativement complexes. C'était déjà le cas des Mers. L'hexapode de la photo n'est qu'une sophistication supplémentaire en rendant chaque roue complètement autonome.
2) Le gain en mobilité se fait souvent au détriment de
a) Les besoins en énergie. Or, c'est une contrainte forte, car on est limité sur le nombre de mètres carrés de panneaux solaires et sur le système énergétique en général.
b) La simplicité du contrôle du robot. Plus le robot est complexe avec un grand nombre de degrés de liberté, plus il est difficile de concevoir des commandes simples. Par exemple, pour un Mer, il est simple d'envoyer une commande "avancer 20 cm", sans avoir à se soucier de la position exacte des roues. Pour un robot hexapode, ça semble plus délicat, car il y a de multiples façons d'avancer de 20 cm ... Et si jamais le robot est dans un éboulis de pierre, c'est franchement la galère pour définir le bon mouvement qui permettra d'avancer sans coincer une patte, glisser ou rouler ...
c) La complexité du programme qui commande le robot et donc la robustesse de ce dernier. En particulier, dans le domaine de l'aéronautique et de l'espace, tout doit être parfaitement contrôlé et testé, il est hors de question qu'on ne sâche pas avec précision et sans ambiguïté les conséquences de chaque commande. En clair, il n'y a aucune place pour un programme complexe où certaines lignes de code n'auraient pas été testées ... Pour rappel, les Mers avaient un programme IA intégré pour avancer de manière autonome sur de longues distances en évitant les obstacles ... mais à ma connaissance, ce dernier n'a jamais été exploité, les Mers étant pratiquement télécommandés à 100%.
Cordialement,
Argyre
Argyre- Messages : 3397
Inscrit le : 31/01/2006
Age : 58
Localisation : sud-ouest
Re: L'Hexapode ... futur robot martien ?
Lun 26 Mai 2008 - 17:56
Certes, ils sont loins d'être autonomes, mais les extensions de missions successives, ont permis de tester un ou plusieurs algorithmes les rendant aujourd'hui plus autonomes qu'au début de leurs missions. Ils ont donc servis aussi comme bancs d'essai technologiques.Argyre a écrit:Pour rappel, les Mers avaient un programme IA intégré pour avancer de manière autonome sur de longues distances en évitant les obstacles ... mais à ma connaissance, ce dernier n'a jamais été exploité, les Mers étant pratiquement télécommandés à 100%.
Cordialement,
Argyre
Skyboy- Messages : 2167
Inscrit le : 05/10/2006
Age : 43
Localisation : 46°48'N-71°23'O -

 Sujets similaires
Sujets similaires» Elon Musk et la conquête de Mars
» MHS - un hélicoptère martien
» Abandon du programme SHUTTLE et ISS
» Habitat martien
» Mars Exploration Rovers (MER) (2003-2018)
» MHS - un hélicoptère martien
» Abandon du programme SHUTTLE et ISS
» Habitat martien
» Mars Exploration Rovers (MER) (2003-2018)
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum