
Mission Hayabusa-2 - Astéroïde Ryugu
Le forum de la conquête spatiale :: Actualité spatiale :: Exploration du système solaire, et au delà ... :: Comètes, astéroïdes, planètes naines
Page 13 sur 29
Page 13 sur 29 •  1 ... 8 ... 12, 13, 14 ... 21 ... 29
1 ... 8 ... 12, 13, 14 ... 21 ... 29 

 Re: Mission Hayabusa-2 - Astéroïde Ryugu
Re: Mission Hayabusa-2 - Astéroïde Ryugu
 Mar 7 Aoû 2018 - 10:57
Mar 7 Aoû 2018 - 10:57
Hayabusa-2 est en constante ascension, l'opération de mesure de gravité étant terminée.
Il était prévu d'augmenter le ΔV, mais comme un typhon approche, l'opération est retardée : il s'agit de rester en contact une fois la position d'origine atteinte.
Il était prévu d'augmenter le ΔV, mais comme un typhon approche, l'opération est retardée : il s'agit de rester en contact une fois la position d'origine atteinte.
Wakka- Admin

- Messages : 31604
Inscrit le : 10/07/2008 -


Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 7 Aoû 2018 - 15:23
Image prise à environ 1 km d'altitude :



Fabien0300- Modérateur

- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 7 Aoû 2018 - 16:04
Avec un repère d'échelle


Mustard- Admin
- Messages : 32359
Inscrit le : 16/09/2005
Age : 55
Localisation : Rouen/Normandie -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 7 Aoû 2018 - 21:04
Mustard, tu peux nous faire la même en vidéo avec une approche de Ryugu par la navette...? :D
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Sam 11 Aoû 2018 - 1:24
Entretien (en anglais) avec le chef de projet de l'atterrisseur MASCOT. Il explique comment l'équipe prépare l'atterrisseur pour sa mission, comment ses tâches se dérouleront sur l'astéroïde et quels sont les risques à venir :
https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29259/#/gallery/31615
https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29259/#/gallery/31615
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 14 Aoû 2018 - 15:21
Entretien avec Ralf Jaumann (DLR) qui travaille à trouver le site d'atterrissage idéal pour MASCOT :
https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29344/#/gallery/31673
https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29344/#/gallery/31673
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 14 Aoû 2018 - 17:34
Discussions actuellement au CNES à Toulouse pour choisir le site d'atterrissage de MASCOT :

Les 10 sites possibles (en bleu clair les zones d'atterrissage et en bleu foncé les zones de rebond) :
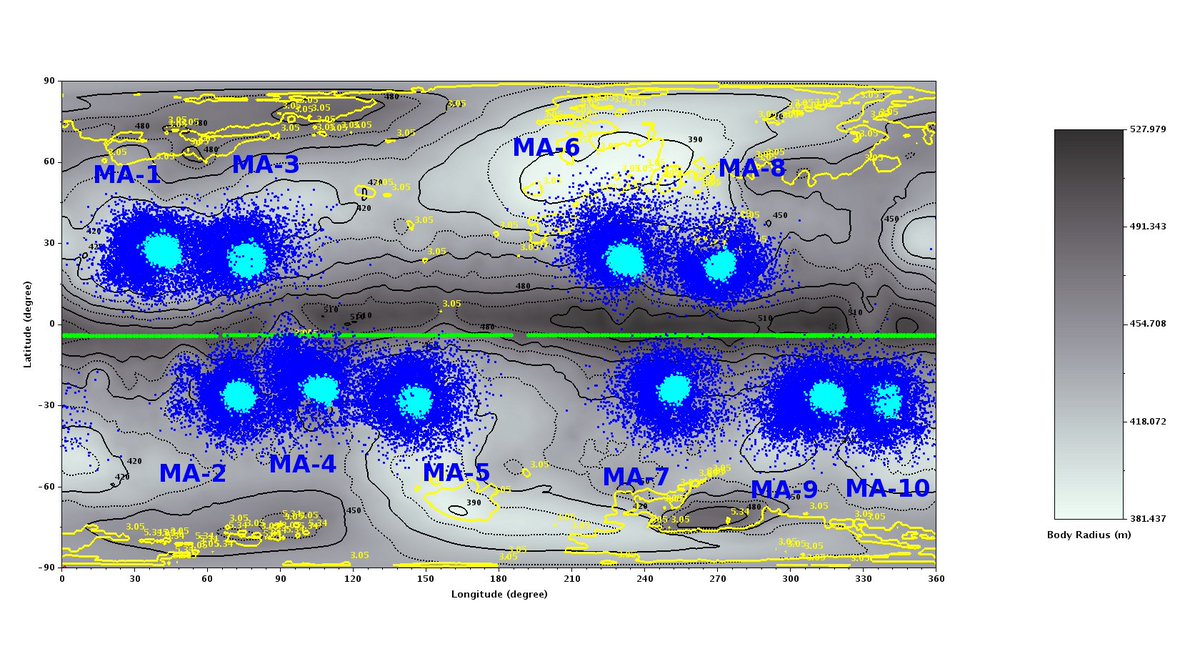
Les 10 sites possibles (en bleu clair les zones d'atterrissage et en bleu foncé les zones de rebond) :
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 14 Aoû 2018 - 19:49
Fabien0300 a écrit:Les 10 sites possibles (en bleu clair les zones d'atterrissage et en bleu foncé les zones de rebond) :
Il y a des risques de rebond :bounce1: ça doit leur rappeler quelque chose a Toulouse. La seul fois ou je suis allée au cnes ils cherchaient encore philae
Dernière édition par phenix le Mar 14 Aoû 2018 - 20:06, édité 1 fois

phenix- Messages : 3060
Inscrit le : 22/02/2015
Age : 30
Localisation : Hier:Ardèche Aujourd’hui:Marignane Demain:Vénus -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 14 Aoû 2018 - 19:51
phenix a écrit:Il y a des risques de rebond :bounce1:ça doit leur rappeler quelque chose a Toulouse.
Sauf que ce coup-ci ça sera nominal (donc pas un risque mais attendu) ;)

Syl35- Donateur

- Messages : 1021
Inscrit le : 02/08/2012
Age : 42
Localisation : Rennes
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Mar 14 Aoû 2018 - 19:53
Oui :roll: d'ailleurs une bonne partie de l'équipe bossait sur Philae. Sauf que cette fois-ci, les rebonds seront volontaires et même espérés. L'équipe souhaite un ou deux rebonds pour analyser plusieurs sites
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 0:14
Les 10 sites possibles en 3D
https://twitter.com/_RomanTkachenko/status/1030604102877806594
https://twitter.com/_RomanTkachenko/status/1030604102877806594
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 9:40
Vu la surface utile et comptes tenus des rebonds probables, il était difficile d'en trouver beaucoup plus :blbl:
Astro-notes- Messages : 17235
Inscrit le : 12/04/2006
Age : 82
Localisation : Corse du Sud -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 13:22
La structure de MASCOT en fait un atterrisseur présentant plusieurs faces (parallélépipède rectangle)

Sait-on si un système ingénieux est prévu pour qu'avant l'immobilisation au sol (ou juste après) ce dispositif puisse faire se retourner MASCOT si une face importante est contre le sol (celle avec l'antenne par exemple) ? L'idéal étant de le remettre sur la face censée servir de base. (ainsi tous les instruments peuvent être opérationnels)
Avec les rebonds prévus et le nombre de cailloux plus ou moins gros qui jonchent le sol .... cela parait une bonne idée d'avoir prévu de se dépêtrer d'une fâcheuse position.
Sait-on si un système ingénieux est prévu pour qu'avant l'immobilisation au sol (ou juste après) ce dispositif puisse faire se retourner MASCOT si une face importante est contre le sol (celle avec l'antenne par exemple) ? L'idéal étant de le remettre sur la face censée servir de base. (ainsi tous les instruments peuvent être opérationnels)
Avec les rebonds prévus et le nombre de cailloux plus ou moins gros qui jonchent le sol .... cela parait une bonne idée d'avoir prévu de se dépêtrer d'une fâcheuse position.

montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 13:47
montmein69 a écrit:La structure de MASCOT en fait un atterrisseur présentant plusieurs faces (parallélépipède rectangle)
Sait-on si un système ingénieux est prévu pour qu'avant l'immobilisation au sol (ou juste après) ce dispositif puisse faire se retourner MASCOT si une face importante est contre le sol (celle avec l'antenne par exemple) ? L'idéal étant de le remettre sur la face censée servir de base. (ainsi tous les instruments peuvent être opérationnels)
Avec les rebonds prévus et le nombre de cailloux plus ou moins gros qui jonchent le sol .... cela parait une bonne idée d'avoir prévu de se dépêtrer d'une fâcheuse position.

Petite Crevette- Messages : 335
Inscrit le : 04/10/2016
Age : 55
Localisation : on the surface of the red planet
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 16:03
évidemment, la comparaison avec Philae est inévitable. C'est une bonne chose qu'une partie de l'équipe de Philae soit aussi une partie de l'équipe du projet Mascot, ce sera plus facile de comparer les deux approches.

katalpa- Messages : 2452
Inscrit le : 12/05/2013
Age : 57
Localisation : Mars -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 17:10
Oui, ce serait ballot que la structure s'immobilise à son dernier rebond antenne face au sol. :wall:
Astro-notes- Messages : 17235
Inscrit le : 12/04/2006
Age : 82
Localisation : Corse du Sud -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 17:58
Le principe de déplacement de Mascot est qu'il arrive sans aucun contrôle à la surface de l'astéroide, après plusieurs rebonds, et puis, une fois immobilisé, un système de contrepoids le fait basculer dans la position désirée.Astro-notes a écrit:Oui, ce serait ballot que la structure s'immobilise à son dernier rebond antenne face au sol. :wall:

brexi- Messages : 63
Inscrit le : 06/12/2011
Age : 56
Localisation : Autriche
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 18:31
trop bien se systeme de roue a inertie, vu la gravité , il ne faut une force faible pour le faire bougé. Par contre il y a l'air d'y avoir qu'une roue, donc comment ils font s'il se pose sur une des face parallele a le roue?
phenix- Messages : 3060
Inscrit le : 22/02/2015
Age : 30
Localisation : Hier:Ardèche Aujourd’hui:Marignane Demain:Vénus -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 19:37
Afin de minimiser les rebonds pourquoi ne pas atterrir aux poles ? ça semble déja plus stable car la rotation y est bien moins genante
Mustard- Admin
- Messages : 32359
Inscrit le : 16/09/2005
Age : 55
Localisation : Rouen/Normandie -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 19:55
En tous cas cela va être très intéressant !
Astro-notes- Messages : 17235
Inscrit le : 12/04/2006
Age : 82
Localisation : Corse du Sud -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 20:10
Sur la vidéo précédente on voit justement deux roues... on peut supposer que le Mascot en est lui aussi équipé...phenix a écrit:trop bien se systeme de roue a inertie, vu la gravité , il ne faut une force faible pour le faire bougé. Par contre il y a l'air d'y avoir qu'une roue, donc comment ils font s'il se pose sur une des face parallele a le roue?

moonvie1- Messages : 149
Inscrit le : 08/01/2008
Age : 53
Localisation : Eyragues 13630 BDR
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 20:43
dans la vidéo (imperssionnante, merci) de petite crevette, il y a 3 roue a inertie, une pour chaque axe. mais la sur la vidéo de Mascot, après avoir regardé sous toute les couture, il y a pas trace d'une deuxième roue.moonvie1 a écrit:Sur la vidéo précédente on voit justement deux roues... on peut supposer que le Mascot en est lui aussi équipé...phenix a écrit:trop bien se systeme de roue a inertie, vu la gravité , il ne faut une force faible pour le faire bougé. Par contre il y a l'air d'y avoir qu'une roue, donc comment ils font s'il se pose sur une des face parallele a le roue?



Donc si il (elle? une mascot(te)? :scratch: ) tombe sur une face parallèle a la roue, ils pourrons le (la?) faire touré comme une toupie mais restera sur cette face.
En tout cas sa me rappelle quelque expérience sur KSP, car oui une fois que vous avait explosé toute les roues de votre rover, soit vous abandonné la mission soit vous le faite roulé.
phenix- Messages : 3060
Inscrit le : 22/02/2015
Age : 30
Localisation : Hier:Ardèche Aujourd’hui:Marignane Demain:Vénus -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Dim 19 Aoû 2018 - 20:49
Le protoype Cubli de la première vidéo est très impressionnant.
Je suppose que le cube de MASCOT est plus grand et surtout avec le chargement d'instruments de mesure et de communications, batterie etc ... ce doit être plus lourd.
Mais avec une gravité très faible sur Ryugu .... ils ont du étudier finement que cela pourrait fonctionner.
Dans le domaine des engins automatiques .... les progrès sont manifestes. Et cela permet de se sortir de situations qu'on pensait auparavant trop périlleuses pour être affrontées.
Je suppose que le cube de MASCOT est plus grand et surtout avec le chargement d'instruments de mesure et de communications, batterie etc ... ce doit être plus lourd.
Mais avec une gravité très faible sur Ryugu .... ils ont du étudier finement que cela pourrait fonctionner.
Dans le domaine des engins automatiques .... les progrès sont manifestes. Et cela permet de se sortir de situations qu'on pensait auparavant trop périlleuses pour être affrontées.
montmein69- Donateur
- Messages : 20962
Inscrit le : 01/10/2005
Age : 73
Localisation : région lyonnaise
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Jeu 23 Aoû 2018 - 2:16
Mustard a écrit:Afin de minimiser les rebonds pourquoi ne pas atterrir aux poles ? ça semble déja plus stable car la rotation y est bien moins genante
Cela a été abordé par le chef de projet de MASCOT :
Tra-Mi Ho : chef de projet MASCOT a écrit:Nous savons que nous ne pouvons pas faire atterrir MASCOT sur les latitudes les plus élevées, c'est-à-dire sur les pôles de l'astéroïde. Et comme la sonde Hayabusa2 déscendra sur Ryugu pour collecter des échantillons d'astéroïdes, il existe inévitablement des restrictions pour MASCOT, qui ne doit pas entraver le processus de prélèvement des échantillons.
Fabien0300- Modérateur
- Messages : 3156
Inscrit le : 23/10/2016
Age : 38
Localisation : Nord
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Jeu 23 Aoû 2018 - 9:51
Direct en cours pour l'annonce du site d'atterrissage de MASCOT
_________________
Blog sur le suivi du développement d'Orion

Wakka- Admin
- Messages : 31604
Inscrit le : 10/07/2008
Age : 64
Localisation : Lorient / An Orient -
Re: Mission Hayabusa-2 - Astéroïde Ryugu
Jeu 23 Aoû 2018 - 10:03
En bleu clair, le point d'impact de MASCOT avec en bleu foncé, la zone de rebonds.
Les carrés rouges, le touchdown d'Hayabusa en latitude basse, en rose en latitude moyenne.

Les carrés rouges, le touchdown d'Hayabusa en latitude basse, en rose en latitude moyenne.

Dernière édition par Wakka le Jeu 23 Aoû 2018 - 10:08, édité 1 fois
_________________
Blog sur le suivi du développement d'Orion
Wakka- Admin
- Messages : 31604
Inscrit le : 10/07/2008
Age : 64
Localisation : Lorient / An Orient -
Page 13 sur 29 • 1 ... 8 ... 12, 13, 14 ... 21 ... 29

 Sujets similaires
Sujets similaires» Mission Hayabusa-2 - 1998 KY26 (2031)
» Mission Hayabusa (2003-2010)
» Chine - mission vers un astéroïde
» Marco Polo, la mission de retour d'échantillon d'astéroïde proposée à l'ESA
» Question sur une future mission humaine sur un astéroïde
» Mission Hayabusa (2003-2010)
» Chine - mission vers un astéroïde
» Marco Polo, la mission de retour d'échantillon d'astéroïde proposée à l'ESA
» Question sur une future mission humaine sur un astéroïde
Le forum de la conquête spatiale :: Actualité spatiale :: Exploration du système solaire, et au delà ... :: Comètes, astéroïdes, planètes naines
Page 13 sur 29
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum